Hello everyone,
For our project we need awd template with center differential, front and rear differential, i wanted to use awd_template from acar concept database, in help is writen:
Topology
The AWD driveline template consists of a two-piece prop shaft, a slip yoke, and three differentials. Transmission output torque is applied to the center differential, which splits torque to the front and rear prop shafts, and from there to the front and rear differentials. The prop shaft input part attaches to the powertrain through a revolute joint...
I made simple overall graphical topology of template (pdf in attachment):
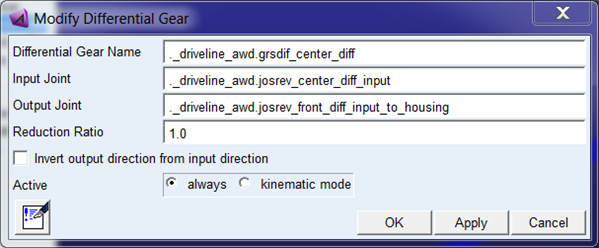
What i do not understant how center differential is working. The mount part for connecting powertrain is connected to propshaft input -> propshaft front -> slip yoke -> propshaft rear -> rear differential. There is also joint torque which feed joint of center differential, which goes directly to input of front differential, with ratio of 1.
Question is how to setup 60-40 in center differential, for me it is looking now 100-100, with possiblity to change just input to front differential, with always 100 to rear differential
Thanks for help
Jozef
Attached Files (1)