
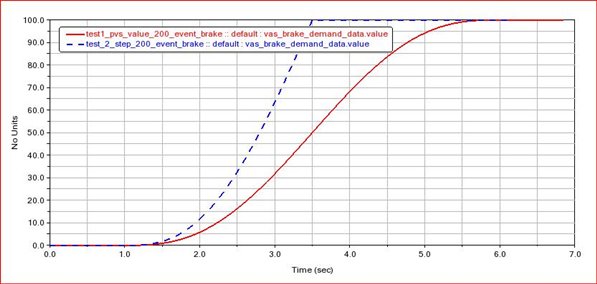
Hello everyone, can some explain me how is brake demand outputed from testrig to brakes subsystem from shared directory.
Help says:
The torque on the rotor depends on a number of parameters. The front right torque function is:
T = 2 x PistonArea x BrakeLinePressure x µ x EffectivePistonRadius x STEP
where:
BrakeLinePressure is calculated as follows:
BrakeBias defines the front and rear proportioning of the brake line pressure...
From thi it looks like brake demand unit is force, its maximum value which can be applied to brakes is defined by parameter variable pvs_max_brake_value.
Default value of this parameter is 100, unit Newton [force]. Help about this parameter says it is unit less. This parameter is outputed to testrig.
Help about this communicator says:
cis_max_brake_value parameter_real any Output from brake subsystem (maximum brake signal value).
For me still looks like brake demand si force applied on brake pedal in Newtons.
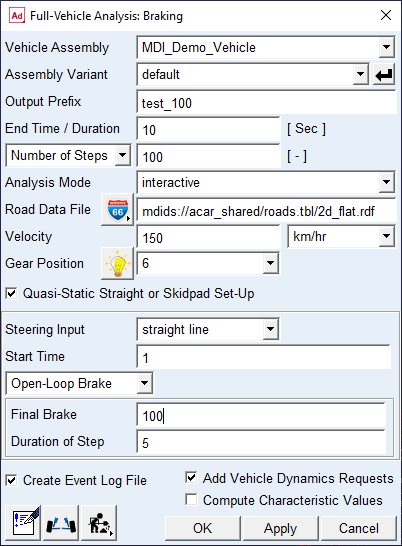
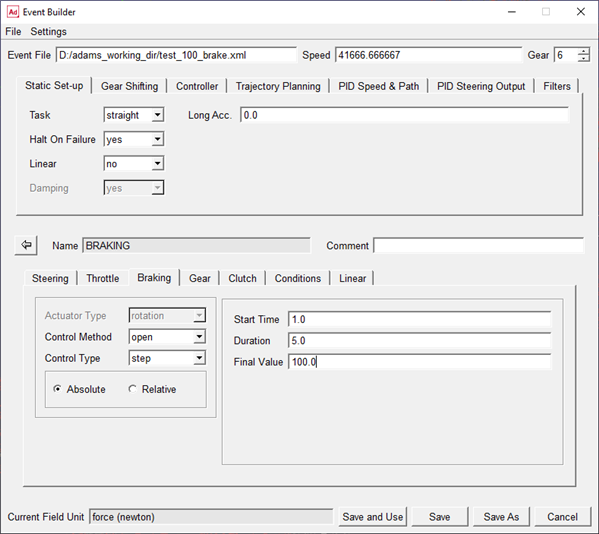
But when i want to make full vehicle analysi:braking with demo vehicle input for final brake value is accepting 0-100, from this it looks like brake demand is in percents??
Changing pvs_max_brake_value in brake template is AFAIK not changing brake demand
So what is actually brake demand force? max value is maximum 100? I am confused
Thanks for response
Jozef
