
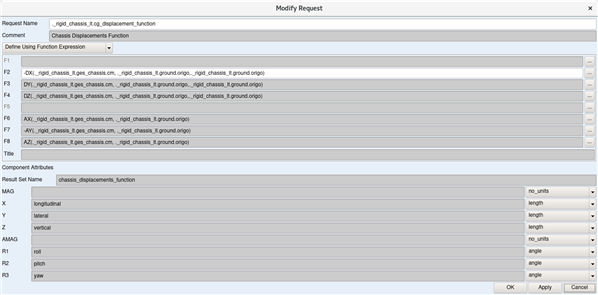
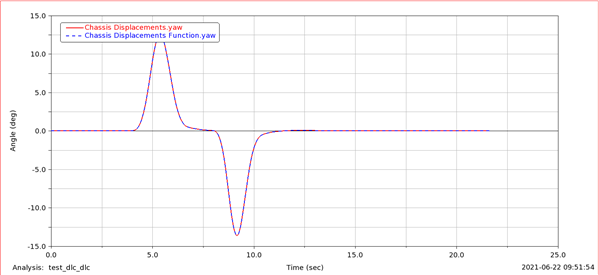
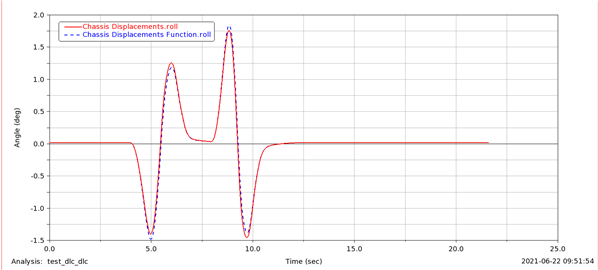
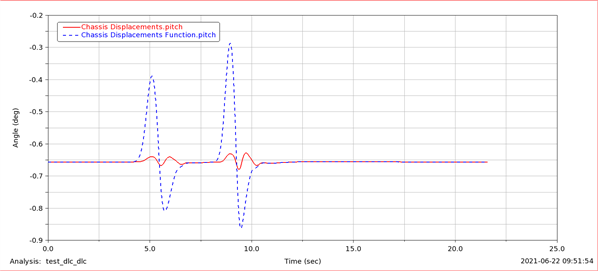
Hello, I want to make request same as 907 (measuring displacement) but with functions:
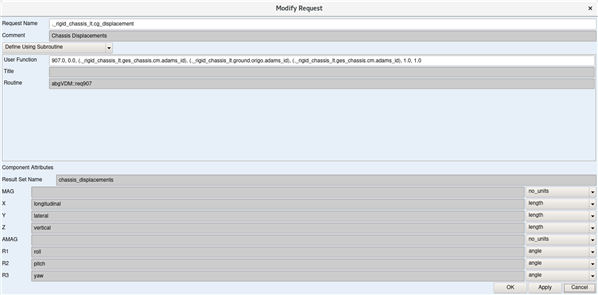
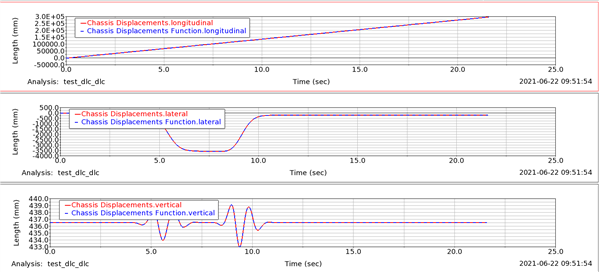
Also what I do not understand is why subrutine 907 for longitudinal displacement is giving positive values (i think vehicle is going in minus direction of GCS).
Thanks
Jozef
