I had the crazy idea to use the RT Solver to speed up a set of analysis (using FTire and dtout=1e-3 s)
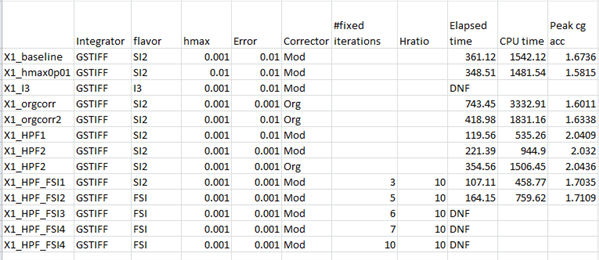
So I tested the MSC Demo vehicle for one typical case and found the benchmark time was 2:05 min for everything on default settings.
Then after a week of hazzle with updating the license file I finally tried with different settings for FIXIT and HRATIO.
After some experiments I even found 1 and 2 being some 26 s slower than the standard-settings.
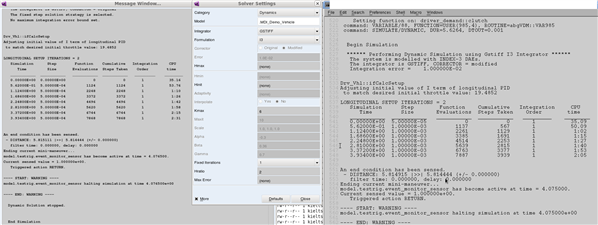
Furthermore the RT solver did not work with my own (even simpler model). It simply would not start running the dynamics with the RT option.
(Model works just fine with GSTIFF)
Calling this disappointing would be a compliment from the user point of view.
At the end you guys require buying a license for making my analysis unstable and slower ?