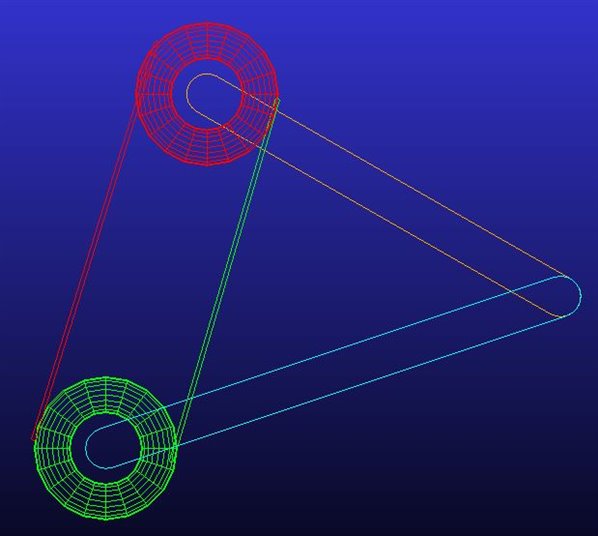
Say I have two arms with a revolute joint in between them. At the end of two arms are two pulleys which has a belt.
Is it possible to create a tangent action and reaction force at each pulley (no slip) so that there is no need to create belt/chain and all complex calculations that come with it. Can it be modeled without using ADAMS machinery?