
Hello Everyone,
I built two suspension templates. The only one difference is with and without Switch Part.
Meanwhile the topologieplan between them is the same. That means, force or/and joint elemnt connect always between A part and B part.
What I can not understand:
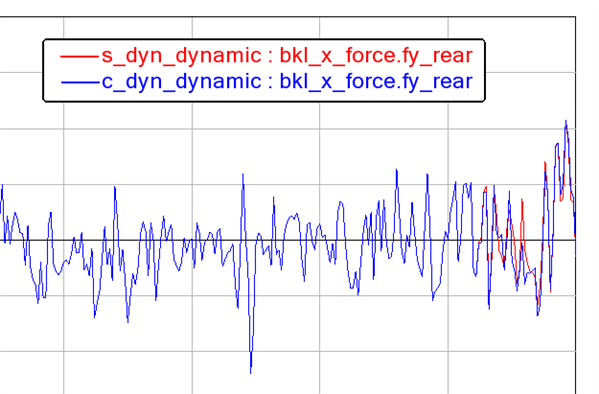
1. There come out the difference of resutls on the dynamic simulation (the results in quasi-static simulation are the same) . On my opionion, the results should be totly the same. Because switch part = part (massloss) + fixed joint.
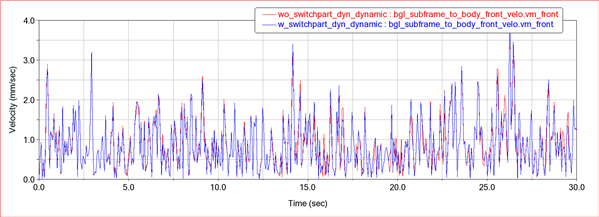
2. The difference appears not immediately in the beginning of simulation, howeverappare for a while.
Attached Files (2)


