I have drive and driven gears mounted on the drive and driven shafts respectively. Torque and speed are applied to the drive shaft. When my dynamic simulation starts, some random force is generated but when it reaches a steady state, the transmitted force is zero.
Spec:
1- Two spur gears
2- Method: Detailed
3- Contact setting as default (friction, stiffness, and damping are considered)
4- The connection type for both gears is fixed to the shaft.
5- The drive shaft has a revolute joint and the drive shaft (with a larger gear) is supported with two bearings.
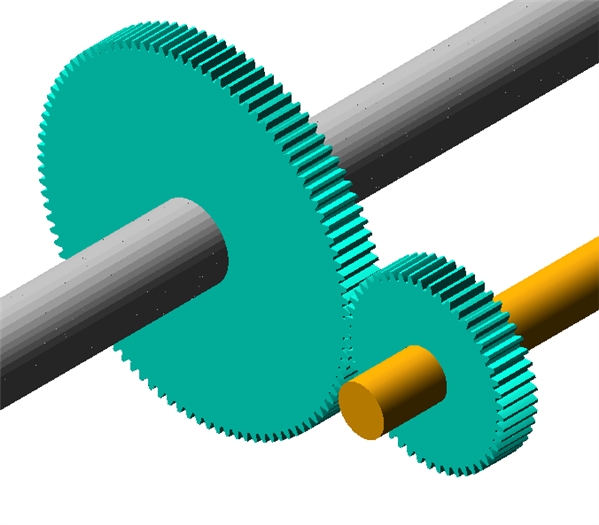
See the following picture and please let me know what the issue is.
Abbas