
Hello,
I'm trying to run a double lane change simulation using the custom full vehicle assembly. Once I run the simulation, the vehicle seem to have difficulty following the desired path. I've tried both "default" and "max radius path" controller type, both not able to follow the path correctly.
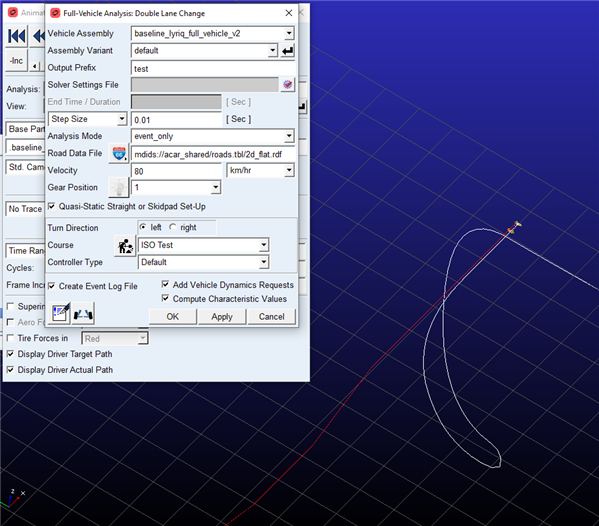
Is there a feature that I might have missed that I need to control in order to keep the vehicle on the right track?
Any help would be much appreciated.
Thanks
