I am simulating an internal gear pair with the same number of teeth in rotation. I defined a cylindrical coordinate system for the internal gear and would like to export resultant contact normal forces and direction in each contacting node of the internal gear.
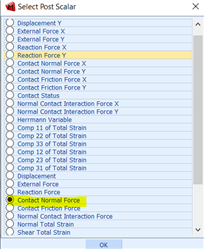
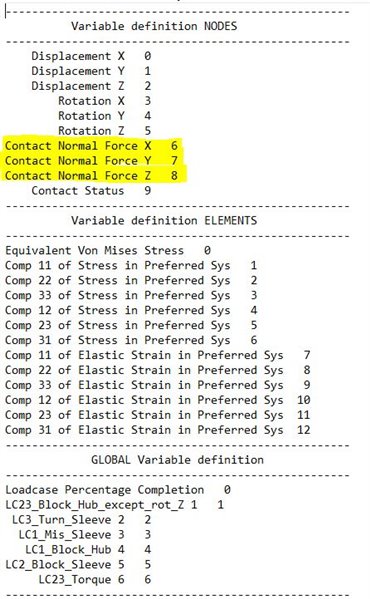
For the moment what I get is Contact normal force in X, Y, Z global coordinates.
Can I extract the information desired directly from Marc or do I have to post-treat myself?
Thank yu very much for you help!