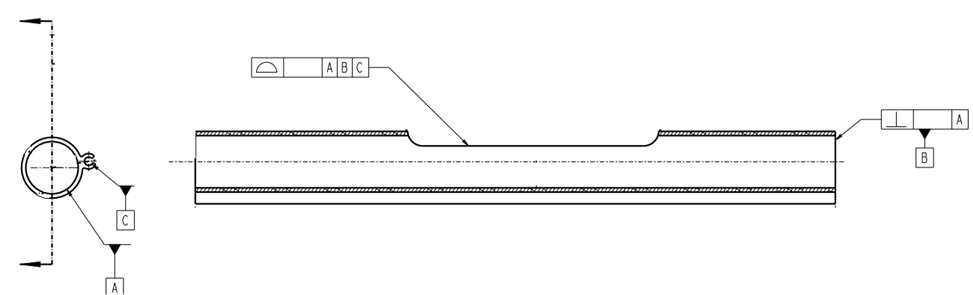
Today's conversation is datum precedence.
Should this be A|C|B and can it be A|B|C? (according to asme y14.5)
My understanding is that it SHOULD be A|C|B and that A|B|C is wrong - but it has now turned into a topic of debate as it cannot be found in the standard.