
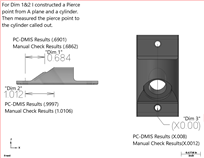
On the blueprint I have provided the Dimensions I need and the results I am getting.
I am currently running on PC DMIS 2021.1
CMM SF 7.10.7

Your Products have been synced, click here to refresh

| © 2025 Hexagon AB and/or its subsidiaries. | Privacy Policy | Cloud Services Agreement |

