

From other threads, I knew we can construct features from points data with different math methods.
The core manual is perfect, but I could not help try right away.
I had a circle C1 now, since I could not construct circle with F9, so constructed a circle with other points and replaced with hit data, but it did not work well.
Can we type those construct command ? And how to work on with hit data for those?
Thank you for any help
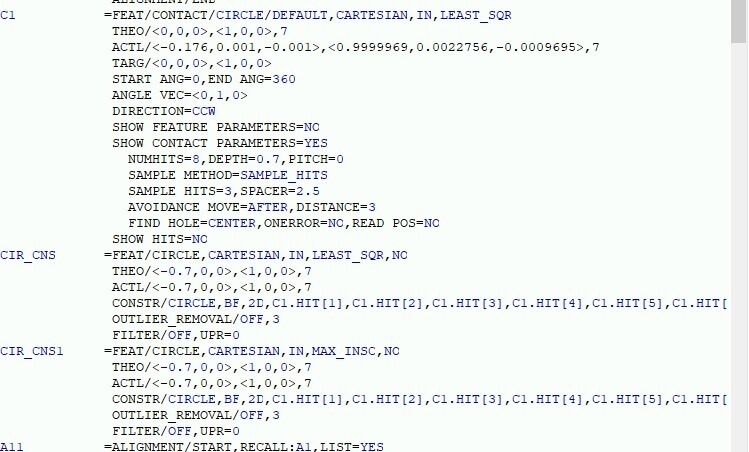
Attached Files


