
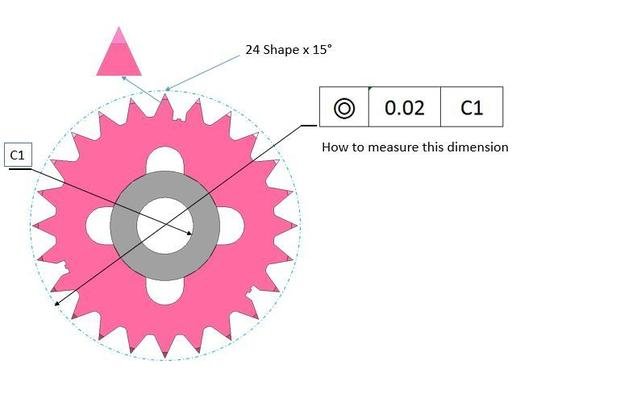
can you give me advise to checking concentric circles as below picture.
Your Products have been synced, click here to refresh
This exact problem occurs for me as well, despite following the help file example to the point. I think that loops with alignments are still broken and doesn't perform as expected.
STARTUP =ALIGNMENT/START,RECALL:USE_PART_SETUP,LIST=YES
ALIGNMENT/END
MODE/MANUAL
PREHIT/3
RETRACT/3
CHECK/10,1
MOVESPEED/ 120
FLY/ON
FORMAT/TEXT,OPTIONS, ,HEADINGS,SYMBOLS, ;NOM,TOL,MEAS,DEV,OUTTOL, ,
LOADPROBE/LSPX1_L50_D5
TIP/T1A0B0, SHANKIJK=0, 0, 1, ANGLE=0
SAVE/ALIGNMENT,STARTUP1.aln,MACHINETOPARTS
[COLOR=#FF0000] SUBROUTINE/TEST SSPROG,[/COLOR]
=
RECALL/ALIGNMENT,EXTERNAL,STARTUP1
F1 =GENERIC/POINT,DEPENDENT,CARTESIAN,$
NOM/XYZ,<0,0,0>,$
MEAS/XYZ,<0,0,0>,$
NOM/IJK,<0,0,1>,$
MEAS/IJK,<0,0,1>
[COLOR=#FF0000]ENDSUB/[/COLOR]
STARTUP =ALIGNMENT/START,RECALL:USE_PART_SETUP,LIST=YES
ALIGNMENT/END
MODE/MANUAL
PREHIT/3
RETRACT/3
CHECK/10,1
MOVESPEED/ 120
FLY/ON
FORMAT/TEXT,OPTIONS, ,HEADINGS,SYMBOLS, ;NOM,TOL,MEAS,DEV,OUTTOL, ,
LOADPROBE/LSPX1_L50_D5
TIP/T1A0B0, SHANKIJK=0, 0, 1, ANGLE=0
ASSIGN/V2=1
DO/
RECALL/ALIGNMENT,EXTERNAL,STARTUP1
V1 =LOOP/START,ID=YES,NUMBER=3,START=1,SKIP=,
OFFSET:XAXIS=0,YAXIS=0,ZAXIS=0,ANGLE=0
IF/V1*V2==1
RECALL/ALIGNMENT,INTERNAL,STARTUP
SAVE/ALIGNMENT,STARTUP1.aln,MACHINETOPARTS
END_IF/
RECALL/ALIGNMENT,EXTERNAL,STARTUP1
CS1 =CALLSUB/TEST SSPROG,D:\Données PCDMIS\Programmes\test sous-prog 1.PRG:,,
REF1 =ALIGNMENT/START,RECALL:STARTUP1,LIST=YES
ALIGNMENT/TRANS_OFFSET,XAXIS,10
ALIGNMENT/END
SAVE/ALIGNMENT,STARTUP1.aln,MACHINETOPARTS
LOOP/END
RECALL/ALIGNMENT,INTERNAL,STARTUP
SAVE/ALIGNMENT,STARTUP1.aln,MACHINETOPARTS
REF2 =ALIGNMENT/START,RECALL:STARTUP1,LIST=YES
ALIGNMENT/TRANS_OFFSET,YAXIS,30
ALIGNMENT/TRANS_OFFSET,XAXIS,-20
ALIGNMENT/END
SAVE/ALIGNMENT,STARTUP1.aln,MACHINETOPARTS
ASSIGN/V2=V2+1
UNTIL/V2==4
PLN1 =FEAT/PLANE,CARTESIAN,TRIANGLE THEO/<-1.0734,-1.8814,0.2>,<0,0,1> ACTL/<2.6488,4.1872,-29.6746>,<-0.0008808,-0.0003019,0.9999996> MEAS/PLANE,3 HIT/BASIC,NORMAL,<-0.6958,-4.3291,0.2>,<0,0,1>,<3.04,1.7491,-29.675>,USE THEO=YES HIT/BASIC,NORMAL,<-0.2143,-0.608,0.2>,<0,0,1>,<3.5505,5.4063,-29.6734>,USE THEO=YES HIT/BASIC,NORMAL,<-2.31,-0.7069,0.2>,<0,0,1>,<1.3558,5.4063,-29.6754>,USE THEO=YES ENDMEAS/ A3 =ALIGNMENT/START,RECALL:STARTUP,LIST=YES ALIGNMENT/LEVEL,ZPLUS,PLN1 ALIGNMENT/TRANS,ZAXIS,PLN1 ALIGNMENT/END LIN1 =FEAT/CONTACT/LINE/DEFAULT,CARTESIAN,UNBOUNDED THEO/<-2.59,-0.3814,0.2>,<0,-1,0>,<-1,0,0>,<0,0,1>,3.5 ACTL/<1.123,5.3968,0.2>,<-0.0004755,-0.9999999,0>,<-0.9999999,0.0004755,0>,<0,0,1>,3.6291 TARG/<-2.59,-0.3814,0.2>,<0,-1,0>,<-1,0,0>,<0,0,1> SHOW FEATURE PARAMETERS=NO SHOW CONTACT PARAMETERS=YES NUMHITS=3,DEPTH=0.0787 SAMPLE METHOD=SAMPLE_HITS SAMPLE HITS=0,SPACER=0,INDENT1=0,INDENT2=0 AVOIDANCE MOVE=BOTH,DISTANCE=0.1575 SHOW HITS=NO A4 =ALIGNMENT/START,RECALL:A3,LIST=YES ALIGNMENT/LEVEL,ZPLUS,PLN1 ALIGNMENT/TRANS,ZAXIS,PLN1 ALIGNMENT/ROTATE,YMINUS,TO,LIN1,ABOUT,ZPLUS ALIGNMENT/TRANS,XAXIS,LIN1 ALIGNMENT/END LIN2 =FEAT/CONTACT/LINE/DEFAULT,CARTESIAN,UNBOUNDED THEO/<-2.0355,-4.761,0.2>,<1,0,0>,<0,-1,0>,<0,0,1>,1.61 ACTL/<0.3947,1.2457,0.2>,<1,-0.0000998,0>,<-0.0000998,-1,0>,<0,0,1>,1.8009 TARG/<-2.0355,-4.761,0.2>,<1,0,0>,<0,-1,0>,<0,0,1> SHOW FEATURE PARAMETERS=NO SHOW CONTACT PARAMETERS=YES NUMHITS=3,DEPTH=0.0787 SAMPLE METHOD=SAMPLE_HITS SAMPLE HITS=0,SPACER=0,INDENT1=0,INDENT2=0 AVOIDANCE MOVE=BOTH,DISTANCE=0.1575 SHOW HITS=NO A1 =ALIGNMENT/START,RECALL:A4,LIST=YES ALIGNMENT/LEVEL,ZPLUS,PLN1 ALIGNMENT/ROTATE,YMINUS,TO,LIN1,ABOUT,ZPLUS ALIGNMENT/TRANS,YAXIS,LIN2 ALIGNMENT/TRANS,XAXIS,LIN1 ALIGNMENT/TRANS,ZAXIS,PLN1 ALIGNMENT/END L2_START_HERE=LABEL/ V3 =LOOP/START,ID=YES,NUMBER=6,START=1,SKIP=,, OFFSET:XAXIS=0,YAXIS=4.961,ZAXIS=0,ANGLE=0 V2 =LOOP/START,ID=YES,NUMBER=5,START=1,SKIP=,, OFFSET:XAXIS=2.79,YAXIS=0,ZAXIS=0,ANGLE=0 MODE/DCC CLEARP/ZPLUS,0.25,ZPLUS,0.25,ON PLN2 =FEAT/PLANE,CARTESIAN,TRIANGLE THEO/<1.13,1.6808,0>,<0,0,1> ACTL/<1.13,1.6807,0.0004>,<0.0010088,0.0006329,0.999999 3> MEAS/PLANE,3 MOVE/CLEARPLANE HIT/BASIC,NORMAL,<1.9245,0.5157,0>,<0,0,1>,<1.9246,0.5 156,0.0004>,USE THEO=YES HIT/BASIC,NORMAL,<0.7223,0.3128,0>,<0,0,1>,<0.7221,0.3 128,0.0017>,USE THEO=YES HIT/BASIC,NORMAL,<0.7432,4.2138,0>,<0,0,1>,<0.7433,4.2 138,-0.0008>,USE THEO=YES ENDMEAS/ MOVE/CLEARPLANE LIN3 =FEAT/CONTACT/LINE/DEFAULT,CARTESIAN,UNBOUNDED THEO/<0,4.2641,0>,<0,-1,0>,<-1,0,0>,<0,0,1>,3.5 ACTL/<0.0001,4.264,0>,<-0.000026,-1,0>,<-1,0.000026,0>,<0,0,1>,3.5 TARG/<0,4.2641,0>,<0,-1,0>,<-1,0,0>,<0,0,1> SHOW FEATURE PARAMETERS=NO SHOW CONTACT PARAMETERS=YES NUMHITS=3,DEPTH=0.0787 SAMPLE METHOD=SAMPLE_HITS SAMPLE HITS=0,SPACER=0,INDENT1=0,INDENT2=0 AVOIDANCE MOVE=NO,DISTANCE=0.1575 SHOW HITS=NO MOVE/CLEARPLANE LIN4 =FEAT/CONTACT/LINE/DEFAULT,CARTESIAN,UNBOUNDED THEO/<0.6243,0,0>,<1,0,0>,<0,-1,0>,<0,0,1>,1.55 ACTL/<0.6243,0.0003,0>,<1,-0.0001078,0>,<-0.0001078,-1,0>,<0,0,1>,1.5502 TARG/<0.6243,0,0>,<1,0,0>,<0,-1,0>,<0,0,1> SHOW FEATURE PARAMETERS=NO SHOW CONTACT PARAMETERS=YES NUMHITS=3,DEPTH=0.0787 SAMPLE METHOD=SAMPLE_HITS SAMPLE HITS=0,SPACER=0,INDENT1=0,INDENT2=0 AVOIDANCE MOVE=NO,DISTANCE=0.1575 SHOW HITS=NO MOVE/CLEARPLANE A5 =ALIGNMENT/START,RECALL:A1,LIST=YES ALIGNMENT/LEVEL,ZPLUS,PLN2 ALIGNMENT/TRANS,ZAXIS,PLN2 ALIGNMENT/ROTATE,YMINUS,TO,LIN3,ABOUT,ZPLUS ALIGNMENT/TRANS,XAXIS,LIN3 ALIGNMENT/TRANS,YAXIS,LIN4 ALIGNMENT/END LIN9 =FEAT/CONTACT/LINE/DEFAULT,CARTESIAN,UNBOUNDED THEO/<2.3707,0.0307,0>,<0.7071068,0.7071068,0>,<0.70710 68,-0.7071068,0>,<0,0,1>,0.2665 ACTL/<2.3713,0.0304,0>,<0.7057502,0.7084607,0>,<0.70846 07,-0.7057502,0>,<0,0,1>,0.2665 TARG/<2.3707,0.0307,0>,<0.7071068,0.7071068,0>,<0.70710 68,-0.7071068,0>,<0,0,1> SHOW FEATURE PARAMETERS=NO SHOW CONTACT PARAMETERS=YES NUMHITS=3,DEPTH=0.0787 SAMPLE METHOD=SAMPLE_HITS SAMPLE HITS=0,SPACER=0,INDENT1=0,INDENT2=0 AVOIDANCE MOVE=NO,DISTANCE=0.1575 SHOW HITS=NO MOVE/CLEARPLANE LIN7 =FEAT/CONTACT/LINE/DEFAULT,CARTESIAN,UNBOUNDED THEO/<2.59,0.4384,0>,<0,1,0>,<1,0,0>,<0,0,1>,3.757 ACTL/<2.5917,0.4385,0>,<-0.0000357,1,0>,<1,0.0000357,0>,<0,0,1>,3.757 TARG/<2.59,0.4384,0>,<0,1,0>,<1,0,0>,<0,0,1> SHOW FEATURE PARAMETERS=NO SHOW CONTACT PARAMETERS=YES NUMHITS=3,DEPTH=0.0787 SAMPLE METHOD=SAMPLE_HITS SAMPLE HITS=0,SPACER=0,INDENT1=0,INDENT2=0 AVOIDANCE MOVE=NO,DISTANCE=0.1575 SHOW HITS=NO MOVE/CLEARPLANE DIM 27= 2D DISTANCE FROM LINE LIN3 TO LINE LIN7 PAR TO XAXIS,NO_RADIUS UNITS=IN,$ GRAPH=OFF TEXT=OFF MULT=10.00 OUTPUT=BOTH AX NOMINAL +TOL -TOL MEAS DEV OUTTOL M 2.5900 0.0050 0.0050 2.5917 0.0017 0.0000 -----#--- PRINT/REPORT,EXEC MODE=END,$ TO_FILE=ON,AUTO=28,AUTO OPEN REPORT=OFF,$ TO_PRINTER=OFF,COPIES=1,$ TO_DMIS_REPORT=OFF,FILE_OPTION=INDEX,FILENAME=,$ REPORT_THEORETICALS=NONE,REPORT_FEATURE_WITH_DIMEN SIONS=NO,$ TO_EXCEL_OUTPUT=ON,AUTO=3,FILENAME=C:\Users\Public \Documents\Hexagon\PC-DMIS\2018 R1\GDM\3000134\3000134 OP 1.XLSX,AUTO OPEN REPORT=OFF,$ PREVIOUS_RUNS=DELETE_INSTANCES LOOP/END LOOP/END
| © 2025 Hexagon AB and/or its subsidiaries. | Privacy Policy | Cloud Services Agreement |



