When I generate trajectory by selecting nodes at every point, my simulation is not working. But when define the trajectory between two nodes, it works. I dont know why this happens ?
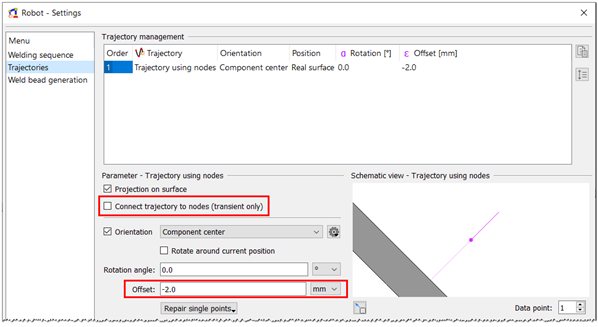
Thank you for sharing the project file. Unfortunately this is a solver bug, so I will give it to our development team. The problem occurs when the option "Connect trajectory to nodes" is enabled. So, please deactivate this option. To be able to catch the deformation of the sheet, please define an offset for the trajectory and increase the height of the heat source geometry.
Additionally, please reduce the number of domains used. The recommendation is to have 10000 to 15000 elements per domain.
Thank you for sharing the project file. Unfortunately this is a solver bug, so I will give it to our development team. The problem occurs when the option "Connect trajectory to nodes" is enabled. So, please deactivate this option. To be able to catch the deformation of the sheet, please define an offset for the trajectory and increase the height of the heat source geometry.
Additionally, please reduce the number of domains used. The recommendation is to have 10000 to 15000 elements per domain.