
ADAMS/View 2022.4
I’m building a new model where I need to bolt two flex bodies together. Part of the goal of the model is to understand the changes in Bolt loads as the system is exercised. We are a “weld the heck out of stuff” kinda place, so please forgive the basic questions…
My initial thought was to apply Bushings as the Bolts and use the preload field to set the clamp load. Nice and linear, and a single modeling element handling everything. I also added a flex-flex contact between the mating surfaces. In my mind’s eye, this was the Bolt behavior I was setting up…
What happens looks more like this…
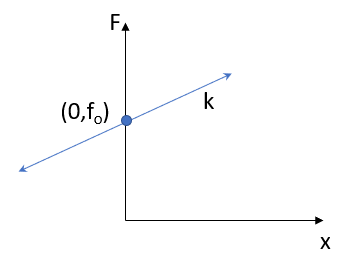
Looking in the help, this makes sense, since (in one direction, ignoring damping for now)…
Fx=-k*x+fo
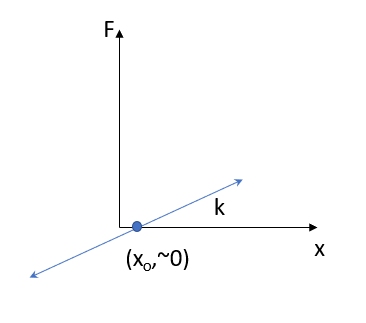
I make a static-dynamic run, and the ppt shows the Bushing force as being near zero, as well as a small amount of Bushing (xo) deflection. I understand why this is happening, but I would like to see my preload and then the changes to it as the system is loaded.
So, I’ve heard of people “tuning” a Bushing in this type of model. What exactly does that mean? Here are the things I’m trying to get my desired (I think it’s what I want) behavior…
1. Bolt/Bushing stiffness –
a. Plain old k=AE/L
b. Looking at Shigley to possibly modify this.
2. Mating surface stiffness/contact –
a. This “reaction” force is very low. No where near my total Bolt preload.
b. From a Free Body standpoint, I think I should be able to chase the Bolt loads through this interface, yes?
c. Also looking in Shigley for suggestions.
3. Adding a second modeling element to provide the preload only.
a. The total of the “preload” Bushing/SFO and the “stiffness” Bushing would be the total force.
b. Not crazy about doubling everything up, as the final model will have several flex bodies bolted on.
Interested in comments and criticism…
