The resultant of a set of vectors is basically the sum of the vectors (ie : <0,1,0> +<,1,0,0> gives <1,1,0>.
The problem with "Figure 11 : Vector math illustration" is that you don't explain what is known (datas) and what you're looking for...
So if you have some vectors, you just have to add them in an assignment.
If you have unit vectors, just use ".ijk", if it's a set of bipoints, then construct vectors as PT2.XYZ-PT1.XYZ (remember that the direction of the vector is done by end point minus start point)
If you want to calculate the resultant from devoations of features, then calculate them from difference between actual and theo.
The resultant of a set of vectors is basically the sum of the vectors (ie : <0,1,0> +<,1,0,0> gives <1,1,0>. The problem with "Figure 11 : Vector math illustration" is that you don't explain what is known (datas) and what you're looking for... So if you have some vectors, you just have to add them in an assignment. If you have unit vectors, just use ".ijk", if it's a set of bipoints, then construct vectors as PT2.XYZ-PT1.XYZ (remember that the direction of the vector is done by end point minus start point) If you want to calculate the resultant from devoations of features, then calculate them from difference between actual and theo.
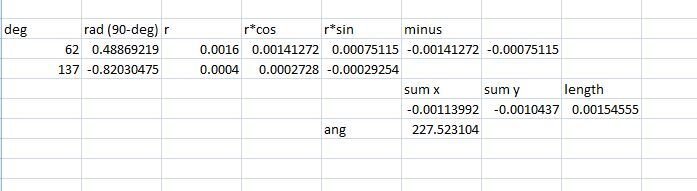
JEFMAN I was in talk with my manager regarding how it can be checked
and he suggested to go old school and do something like i have attached
1. consider the vectors as V1, V2 and Vr
2. change the vector to be substracted as shown in 2nd diagram i.e V2+(-V1)=Vr
3. by joining tip of V1 & starting point of V2 we'll get Vr (sry i mentioned opposite in pdf)
4. use tribometry or other laws of triangle to find the unknown details of Vr
now the issue here is; vectors will vary from part to part and i need to create a program or excel to solve this