CIR11 =FEAT/CONTACT/CIRCLE/ADAPTIVE_CIRCLE_SCAN,CARTESIAN,IN,LEAST_SQR
THEO/<[COLOR=#EE82EE]40.5[/COLOR],0,0>,<1,0,0>,51
[COLOR=#FF0000] ACTL/<40.5,-0.005,-0.032>,<1,0,0>,51.016[/COLOR]
TARG/<40.5,0,0>,<1,0,0>
START ANG=270,END ANG=450
ANGLE VEC=<0,0,-1>
DIRECTION=CCW
SHOW FEATURE PARAMETERS=NO
SHOW CONTACT PARAMETERS=NO
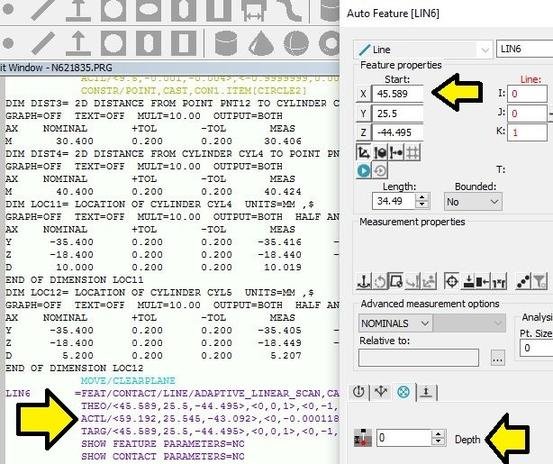
LIN9 =FEAT/CONTACT/LINE/ADAPTIVE_LINEAR_SCAN,CARTESIAN,UNBOUNDED
THEO/<[COLOR=#EE82EE]40.5[/COLOR],25.5,1.125>,<0,0,1>,<0,-1,0>,<-1,0,0>,44.95
[COLOR=#FF0000] ACTL/<78.101,25.753,2.795>,<0,-0.0003722,0.9999999>,<0.0068002,-0.9999768,-0.0003722>,<-0.9999769,-0.0068002,-0.0000025>,41.5[/COLOR]
TARG/<40.5,25.5,1.125>,<0,0,1>,<0,-1,0>,<-1,0,0>
SHOW FEATURE PARAMETERS=NO
SHOW CONTACT PARAMETERS=NO
LIN10 =FEAT/CONTACT/LINE/ADAPTIVE_LINEAR_SCAN,CARTESIAN,UNBOUNDED
THEO/<[COLOR=#EE82EE]40.5[/COLOR],-25.5,1.125>,<0,0,1>,<0,1,0>,<1,0,0>,44.95
[COLOR=#FF0000] ACTL/<78.448,-25.264,2.798>,<0,-0.0002361,1>,<-0.0068005,0.9999768,0.0002361>,<0.9999769,0.0068005,0.0000016>,41.502[/COLOR]
TARG/<40.5,-25.5,1.125>,<0,0,1>,<0,1,0>,<1,0,0>
SHOW FEATURE PARAMETERS=NO
SHOW CONTACT PARAMETERS=NO
Maybe look into this Don Ruggieri ?