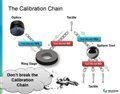
Don't break the calibration chain!
I am posting this in hopes to have it made into a sticky since I see this issue arise a lot in the Vision section. This document perfectly explains the calibration process for calibrating offset with a Vision primary system with TTP.
I have an autocalibrate routine on my bridge cmm and I probably should have one for the optiv.
I see where you do the camera to the ring and then one probe to the ring.
Am I to assume then that this is a master probe?
I have the tesa rack so there's only two probes, but should I be doing both to the ring or not?
My current routine is: Camera to ring, moved yes / Probe 1 to ring, moved no / Probe 2 to ring, moved no.
Then Probe 1 to sphere, moved yes / Probe 2 to sphere, moved no.
I have an autocalibrate routine on my bridge cmm and I probably should have one for the optiv.
I see where you do the camera to the ring and then one probe to the ring.
Am I to assume then that this is a master probe?
I have the tesa rack so there's only two probes, but should I be doing both to the ring or not?
My current routine is: Camera to ring, moved yes / Probe 1 to ring, moved no / Probe 2 to ring, moved no.
Then Probe 1 to sphere, moved yes / Probe 2 to sphere, moved no.
Someone can correct me if I am wrong I think if it is a separate touch probe altogether you always want to hit yes to the sphere. You would always hit no when you do any touch probe to the ring. If a TIP is a part of the Probe build, of course say no to the sphere.
That is a good question however with a tool changer in the mix. I am assuming if you make a load probe change using a tool changer the first thing would be to go to the sphere and hit yes for your newly loaded TTP. Then follow through with the Ring with Vision "Yes" and then back to the same probe to the ring and then "No".
This ensures every new loaded TTP from the changer is secondary to the Vision and freshly calibrated.
I do only 1 probe to the ring after the vision is calibrated to the ring.
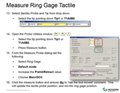
My process, which afotion posted above (which is straight from the book) is:
Vision to Ring: Moved Yes
Probe 1 to Ring: Moved No
Probe 1 to Sphere: Moved Yes
Probe 2 to Sphere: Moved No
Probe 3 to Sphere: Moved No
Probe 4 to Sphere: Moved No
"The Master Probe is normally the first probe calibrated after a machine Certification (Calibration) and only matters if you need to use it in relation to other probes on a single part."
I found this somewhere else in the forum. I have heard the term "Master Probe" before but didn't know exactly what it meant.
Disregard my comment about saying "Yes" to the sphere move every time you change Probes.
I honestly have never used multiple TTPs in a routine, but this was before I had a tool changer so that may change. I have always used multiple TIPS within my probe builds because I am limited to star probes on my machine but never multiple separate touch probe builds. I always have 1 Vision Probe and 1 Touch Probe used in my routines.
Since the relation of one TTP to another TTP is not important to me I always choose that the sphere has "Yes" moved because I do not need it to be related to another touch probe within my routines.
That being said, that is GREAT to know for the future. So if the relation between each Touch Probe build you use in a routine is important for you, I believe you could just choose which one is the Master Touch Probe and relate your others to that.