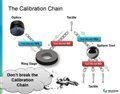
Don't break the calibration chain!
I am posting this in hopes to have it made into a sticky since I see this issue arise a lot in the Vision section. This document perfectly explains the calibration process for calibrating offset with a Vision primary system with TTP.
I have an autocalibrate routine on my bridge cmm and I probably should have one for the optiv.
I see where you do the camera to the ring and then one probe to the ring.
Am I to assume then that this is a master probe?
I have the tesa rack so there's only two probes, but should I be doing both to the ring or not?
My current routine is: Camera to ring, moved yes / Probe 1 to ring, moved no / Probe 2 to ring, moved no.
Then Probe 1 to sphere, moved yes / Probe 2 to sphere, moved no.
I do only 1 probe to the ring after the vision is calibrated to the ring.
My process, which afotion posted above (which is straight from the book) is:
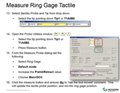
Vision to Ring: Moved Yes
Probe 1 to Ring: Moved No
Probe 1 to Sphere: Moved Yes
Probe 2 to Sphere: Moved No
Probe 3 to Sphere: Moved No
Probe 4 to Sphere: Moved No
I do only 1 probe to the ring after the vision is calibrated to the ring.
My process, which afotion posted above (which is straight from the book) is:
Vision to Ring: Moved Yes
Probe 1 to Ring: Moved No
Probe 1 to Sphere: Moved Yes
Probe 2 to Sphere: Moved No
Probe 3 to Sphere: Moved No
Probe 4 to Sphere: Moved No