Firstly thank you for your reply, are you sure that it is the correct answer to my question because after applying it I cannot see an all wheel drive in my demo vehicle.
the drive bias is basically how much power goes to the front, by Setting it to 50% it means that 50% goes to the front and 50% goes to the back
As you can see from the beginning the fields were disabled, i thought by enabling them it would work however when I ran a few simulations to see if it does work, turns out it doesn't
I read a Little bit more about it, go to the adams help and type in "drive bias" then select the Setup Parameters article
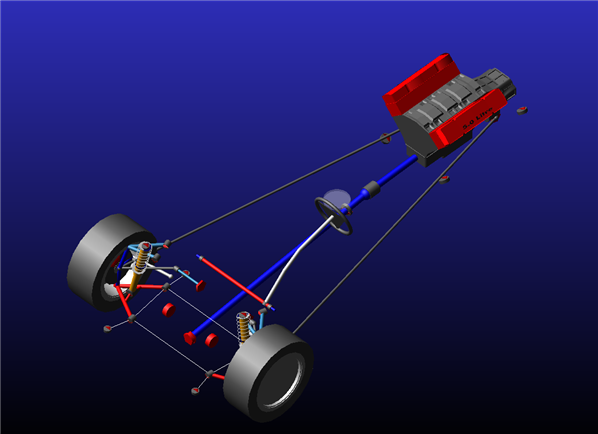
Ok, I will go through that, But my problem is- if you will see the shared database demo vehicle in Adams Car, it is a rear-wheel drive vehicle and I have to make it an All-wheel-drive vehicle may be by using concept AWD.
If I were you, I would replace the front Suspension System with a modified rear Suspension System (you Need to Change the Communicators role so that they get coupled with the correct tires and so on)
Then I would also create new Communicators in the power Train wich will be connected to the front Suspension System. that should do the trick I think
What you Need to do still is to Change the Name of the Communicators and also role
to Elaborate more: you only have one powertrain and you cannot create two Communicators with the exact same Name in one template, therefor you Need to create the Output Communicator co[rl]_tripot_to_differential_front with a front role obviously and then modify the existing Communicator for the tripot to co[rl]_tripot_to_differential_rear (don't Forget to also Change the matching Name by adding _rear to it)
Then I think you Need to modify the existing Communicators in the double wishbone templates to match your powertrain Communicators (i.e the front and rear role as well)
To save time, always use the test Communicators function to make sure you don't waste time on opening and Assembling parts
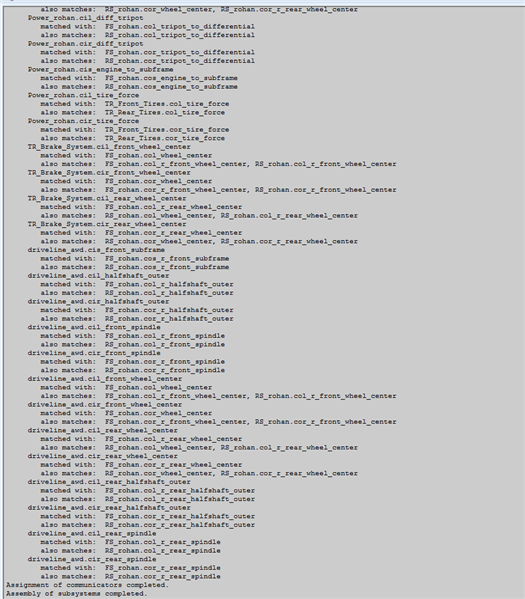
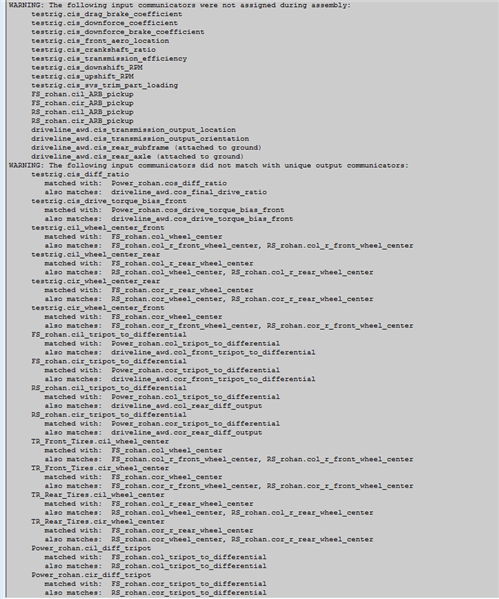
Firstly, thank you so much for your help, It means a lot to me. If possible for you can you please check these screenshots, this is what I am getting after generating the assembly. So that I can improve my results!!!
As I said don't waste your time on checking without making sure you have some Progress, write down on a Piece of paper the Communicators you have to do and then check one after the other, only write a check if the Communicators are matched in a test (to do that, in template mode: build, Communicators, test)
this will be take some time but you will get it right