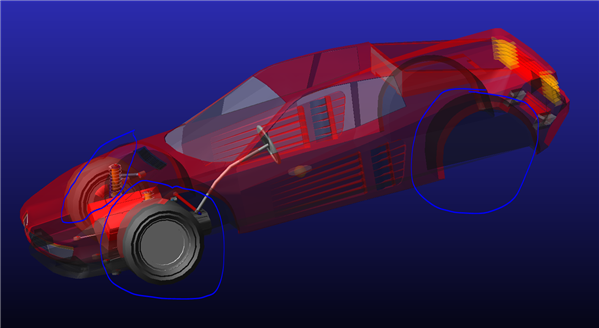
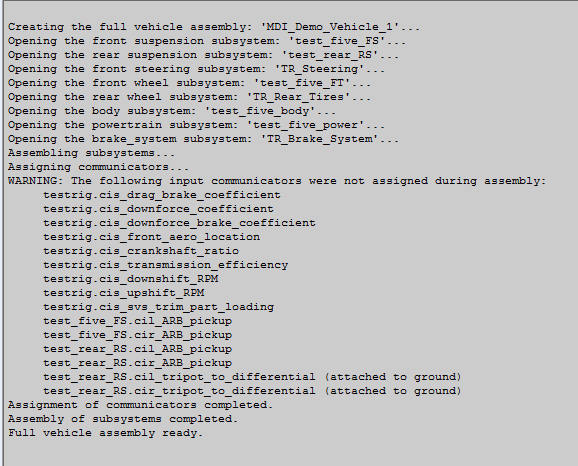
Hello Derbas, The older task was getting little complicated, So I have started with the simple task by making the demo vehicle into a front wheel drive because it uses the same template for the suspensions subsystem. And I was able to connect all the connections. But now the problem is rear tire and rear suspension both are colliding with the front tire and suspension. I hope you can help me with this.
They aren't really colliding, from the Looks of it they are completely overlapping from the beginning ?
In Standard Mode, open the following Subsystems:
YOUR: Front and rear tires and suspension
Shared: Front and rear tires and Suspension
Under adjust, hardpoints, table you will find the coordinates of all the hardpoints
Copy from the shared subystems into your Subsystems and click apply, the components should be then positioned correctly
P.S: If an error occurs, make sure that the copying process didn't add spaces after every value on the last column (Z Values). If so then delete them and press apply again !
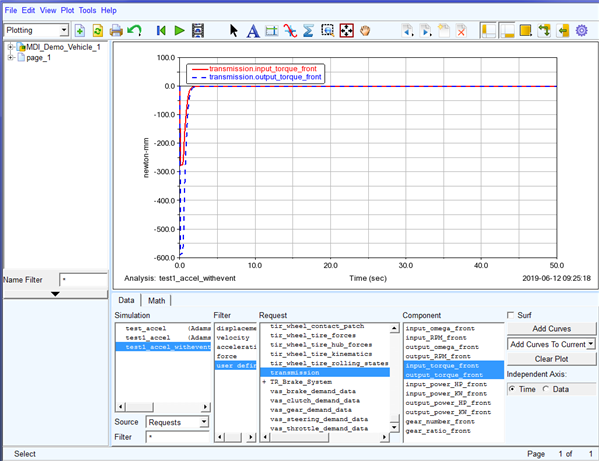
Yes with event builder it worked. Thank you for your help. Still, I am not able to run it with normal simulation?
Also, Is it possible now that I can make communicators in such a way that power can be transmitted to front and the rear wheel with the same power train and it can become 4WD?