Let me preface that I'm very new to programming, as well as, operating the CMM. So something that might seem like a obvious solution to most of you is like finding a needle in a hay stack for me, haha. Thanks!
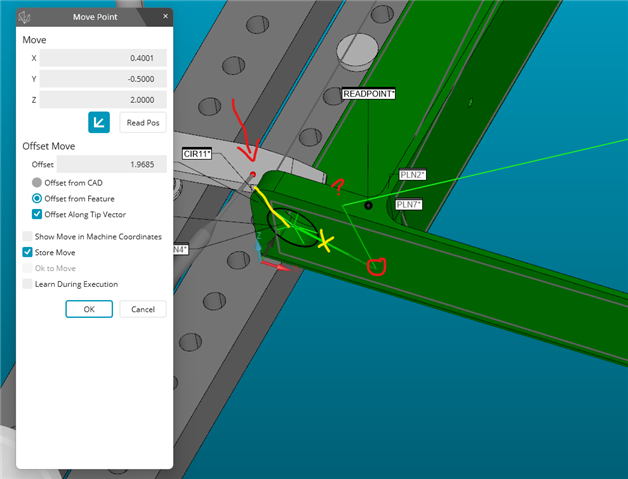
While writing a program for a part, I have run into an issue with the probes movement. You can see, in the image above, that there is a line moving out of frame to the cylinder highlighted. I have been taught to prevent unintentional contact leading to a system crash to add a move point as seen (or use clearance planes/cube). The move point line should move all the way to the probe (indicated by the arrow), but instead stops at the question mark then deviates downwards and along the x-axis the then back towards the cylinder. The path then collides with the structure (indicated by the yellow X) and we cant be having that. My question is why? Why is it just randomly pivoting like this?